伽利略导航系统
-
导航应用实例
伽利略导航系统可以方便的集成到你的机器人当中,使你的机器人具有自动导航移动能力。此为视频一款搭载了伽利略导航系统的服务机器人的应用视频。用户可以通过app方便的控制机器人。
-
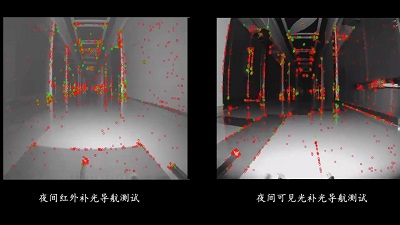
夜间补光测试
伽利略导航系统,只要采用视觉导航。所以在夜间光线比较暗的情况下需要认为补光使用。 在此视频中我们测试了两种补光方式。一种是红外线补光,一种是可见光补光,都获得了不错的效果。
-
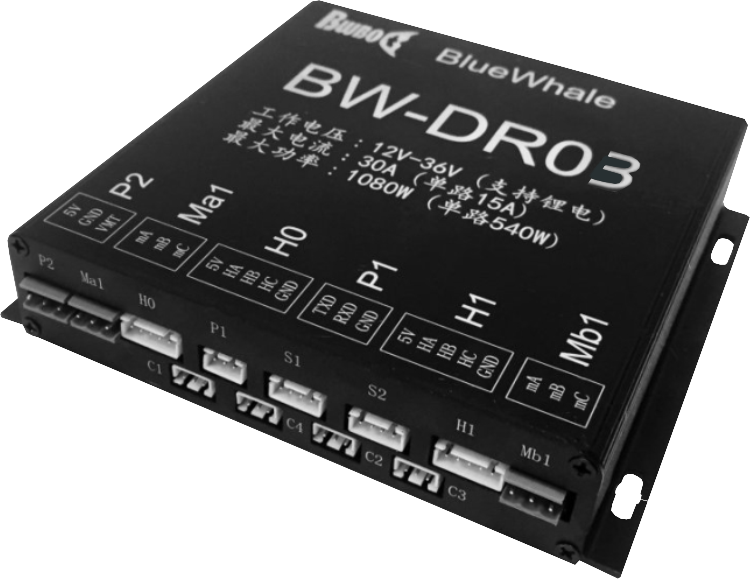
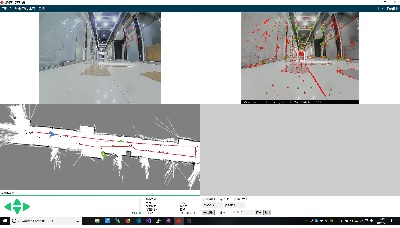
伽利略客户端导航演示
此视频演示了伽利略系统的使用方法。 视频中右上图像中的红色和绿色点为伽利略导航系统所识别的特征点。左下角地图是伽利略系统建立的地图。 地图上的三角形图标标志着当前机器人的位置。通过客户端我们可以控制机器人向特定的目标点移动。
伽利略导航系统是一款用于机器人定位与导航的超高性价比的模块化的解决方案。它采用多种传感器融合定位,具有精度高,稳定性好 的特点。和传统的定位方式相比,伽利略导航系统不需要用户铺设轨道,完全图形化的人机交互界面,使用方便,维护成本低。
了解更多赤兔无人车
-
多功能AGV
赤兔可以在产品生产过程中负责物料配送工作,轨迹灵活,部署方便,适合柔性生产场景,代替工作人员频繁领料送料的工作,虚拟轨迹方便及时调整配送路线、站点。适合电子厂、无尘车间、组装线等场景。
-
赤兔车间物流
赤兔可以在产品生产过程中负责物料配送工作,轨迹灵活,部署方便,适合柔性生产场景,代替工作人员频繁领料送料的工作,虚拟轨迹方便及时调整配送路线、站点。适合电子厂、无尘车间、组装线等场景。
-
客户端展示
通过赤兔客户端用户可以方便的操作机器人。此视频展示了在创建好地图之后如何利用赤兔客户端控制机器人导航


赤兔无人车是由蓝鲸机器人开发的基于ROS的通用智能移动机器人底盘。赤兔采用自动驾驶技术, 具有使用简单,稳定可靠, 移动灵活的特点。 赤兔可以在大型室内外园区实现货物自动投递、巡检巡逻、移动消杀、餐厅送餐等场景。赤兔的使用方式也非常简单。首先遥控赤兔机器人在工作环境中走一遍,让机器人记住周围环境。 此时机器人会自动的创建一个周围环境的地图。通过客户端在机器人创建的地图中绘制用户想要机器人行走的路线。点击开始后机器人就可以自动开始移动了。
了解更多小强
-
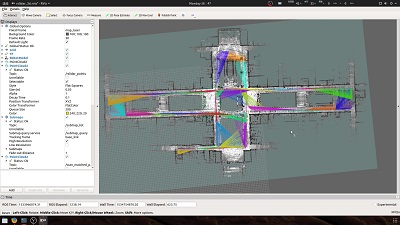
激光雷达实时创建地图和定位
小强搭载上激光雷达后,可以方便快捷的进行环境地图的建立和机器人导航。在激光雷达的实际使用中 需要机器人提供较为精确的里程计信息。小强的里程计通过陀螺仪和编码器融合得到,准确度高。从此 视频中可以看出在大范围(200Mx400M)情况下小强所建立的地图仍然十分精准。
-
摄像头导航
小强使用摄像头采集周围环境图像,运用其强大的计算能力,识别出环境的三维结构。 视频中的红色和绿色点即为其识别出的环境特征点。视频中左下角地图为其识别出的环境地图。 可以看出小强可以流畅的运行视觉SLAM程序,并提供较为精准的定位信息。
-
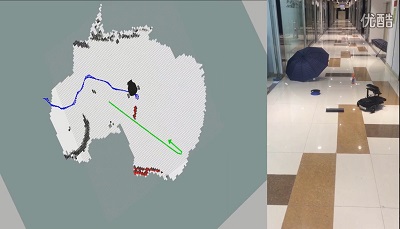
RGBD 避障
在地面上随机的摆放着障碍物。小强通过深度摄像头的获取到障碍物的信息。视频中的绿色曲线就是小强的目标线路和位置。小强根据障碍物的情况,实时的规划路径。即视频中的蓝色曲线。可以看出即使是在比较复杂的障碍物环境中,小强也可以流畅的运动到目标的位置。
小强是一款专门用于ROS和SLAM技术开发的机器人平台。它具有强大的运算能力,持久的电池续航能力和灵活的运动能力,非常适合用来开发基于ROS的导航和机器视觉算法。 小强整体为四轮式结构,前面两个主动轮,后面两个万向轮作为从动轮。这样的结构能够保证其转弯角度的准确性。同时轮子采用不易打滑的橡胶材质再次保证了运动的精确性和稳定性。电机采用德国进口电机,单独控制器进行控制。小强的主控制器为一台i7处理器的mini电脑,包含8G内存和128G固态硬盘。这样的硬件配置保证了小强强大的运算能力。电池为12V 20AH锂聚合物电池,经过测试可以保证连续使用七个小时以上。
了解更多轮毂电机驱动器
-
高速运动
蓝鲸轮毂电机驱动器可以驱动轮毂电机稳定的高速转动。视频中展示的是小强XQ5,轮毂电机高速旋转。
-
动力强劲
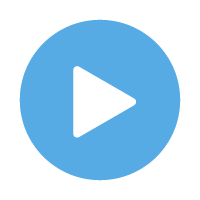
蓝鲸轮毂电机驱动器,最大功率1080W,单路540W。视频中的坦克车由本驱动器驱动,可以看出其动力强劲,所向披靡。
-
直线运动
视频中小车由蓝鲸轮毂电机驱动。从视频可以看出小车可以稳定的保持高速直线运动。



蓝鲸智能轮毂电机驱动器提供电机速度闭环控制,控制精度在1%以内。最大功率1080W(单路540W)。工作电压12V到36V(支持锂电池)。尤其在低速条件下,我们的性能远远超过市场上的其他驱动器。不仅如此,我们还提供这款驱动器的ROS驱动程序。这样您可以在ROS中直接控制电机运动。同时此驱动器还提供9轴陀螺仪数据,里程计数据。方便继续开发ROS相关的导航程序。并且此驱动器可以选配红外传感器和超声波传感器,直插即可。蓝鲸智能轮毂电机驱动器性能强大功能齐全,是机器人开发的首选方案。
了解更多自动充电
-
二维码自动充电
二维码自动充电
蓝鲸自动充电模块利用充电桩的二维码进行定位,实现机器人底盘的自动充电功能。用户只需要分别将 充电桩固定在墙角,充电模块固定在机器人底盘的合适位置上就可以开始使用了。用户通过程序向机器人发送 开始充电的信号,机器人底盘即可开始自动的向充电桩移动,完成充电过程。
-
红外自动充电
红外自动充电
蓝鲸自动充电模块利用充电桩的红外信号进行定位,实现机器人底盘的自动充电功能。用户只需要分别将 充电桩固定在墙角,充电模块固定在机器人底盘的合适位置上就可以开始使用了。用户通过程序向机器人发送 开始充电的信号,机器人底盘即可开始自动的向充电桩移动,完成充电过程。


蓝鲸自动充电模块利用充电桩的红外信号进行定位,实现机器人底盘的自动充电功能。用户只需要分别将 充电桩固定在墙角,充电模块固定在机器人底盘的合适位置上就可以开始使用了。用户通过程序向机器人发送 开始充电的信号,机器人底盘即可开始自动的向充电桩移动,完成充电过程。
了解更多更多产品
-
多功能越野线控地盘

多功能越野线控地盘
多功能越野线控地盘多功能越野底盘
我们的SW-XL-001室外通用机器人底盘是一款多功能越野底盘,具有出色的性能和稳定的导航系统,可以满足您在不同场合的需求。它采用视觉和雷达混合导航,能够轻松应对各种复杂环境,驱动形式为四轮轮差速驱动,行走方式包括前进、后退、旋转、分岔转弯等多种功能,行走速度高达1.5米/秒,额定负载可达500千克,爬坡不大于8度,越障不大于50毫米。
此外,SW-XL-001还具有灵活的转弯半径,原地90度/180度/360度旋转,导航精度高达±10毫米,充电方式可以手动或自动充电,安全防护方面采用障碍物传感器、激光雷达、超声波和急停按钮等多种技术手段,确保您的安全。续航时间长达8小时,可根据客户需求定制。
此外,SW-XL-001还具有转向灯和呼吸灯等灯光,方便夜间操作,人机交互方面可以通过上位机系统调度,语音功能可以进行语音播放和语音指令识别。
我们的SW-XL-001室外通用机器人底盘是一款性能卓越、功能齐全、安全可靠的机器人底盘,可以广泛应用于工业自动化、物流运输、环境监测等领域。我们的产品质量得到了广大客户的认可和信任,我们将竭诚为您提供优质的产品和服务。
性能参数 说明 产品型号 SW-XL-001 外形尺寸 L730*W630*H400(可定制) 最小离地间隙 60mm 导航类型 视觉+雷达混合导航+差分GPS 驱动形式 四轮轮差速驱动 行走方式 前进、后退、旋转、分岔转弯、等多功能行驶 行走速度 0-1.5M/S 额定负载 100KG-500KG 爬坡越障 爬坡不大于8°越障不大于50MM 转弯半径 原地90°/180°/360°旋转 导航精度 ±10mm 充电方式 手动充电/自动充电 安全防护 障碍物传感器+激光雷达 超声波+急停按钮 续航时间 8H(可定制) 灯光 转向灯/呼吸灯 人机交互 上位机系统调度 语音功能 语音播放/语音指令识别 -
多功能物流AGV

多功能物流AGV
多功能物流AGV多功能物流AGV
我们的CT-WL-002多功能物流AGV是一款高效、智能的自动化物流运输设备。它采用视觉+雷达混合导航,配备障碍物传感器、激光雷达和超声波等安全防护措施,能够实现前进、后退、旋转、分岔转弯、等多种行驶方式,让您的物流运输更加灵活、高效、安全。
它的驱动形式为二轮差速驱动,最大负载能力为100KG,爬坡不大于8°,越障不大于20MM,满足您的各类物流运输需求。同时,它还具备手动充电、自动充电等多种充电方式,续航时间长达8H,让您的物流运输更加便捷、高效。
我们的CT-WL-002多功能物流AGV还配备了10寸触摸屏、语音播放、语音指令识别等人机交互功能,让您的操作更加便捷、智能。它广泛应用于工厂、仓库、医院、酒店、机场等各种场所,实现物流运输自动化,提升工作效率,降低运输成本。
如果您正在寻找一款高效、智能的物流运输设备,我们的CT-WL-002多功能物流AGV是您不可错过的选择。我们的产品已经得到了众多用户的认可和好评,您可以放心购买。
性能参数 说明 产品型号 CT-BY-001-100 外形尺寸 L600*W500*H260(可定制) 货架尺寸 L600*W500*H250-单层(可定制尺寸、层数) 最小离地间隙 30mm 导航类型 视觉+雷达混合导航 驱动形式 二轮差速驱动 行走方式 前进、后退、旋转、分岔转弯、等多功能行驶 行走速度 0-1.5M/S 额定负载 100KG 爬坡越障 爬坡不大于8°越障不大于20MM 转弯半径 原地90°/180°/360°旋转 导航精度 ±5mm 充电方式 手动充电/自动充电 安全防护 障碍物传感器+激光雷达 超声波+急停按钮 续航时间 8H(可定制) 显示屏 10寸触摸屏 人机交互 上位机系统调度 灯光 转向灯/呼吸灯 语音功能 语音播放,语音指令识别 -
CT-JS-003-500

CT-JS-003-500
CT-JS-003-500潜伏举升AGV
我们的潜伏举升AGV是一款功能强大的自动导航运输车,具备出色的性能和多项先进的功能。它采用视觉+雷达混合导航技术,能够准确导航并自主行走。驱动形式为二轮差速驱动,使其具备出色的灵活性和机动性。不仅可以前进、后退,还能进行旋转、分岔转弯等多种行走方式,适应各种复杂环境。
潜伏举升AGV的行走速度可调节,最高可达1.5米/秒,能够高效地完成运输任务。额定负载范围广泛,从100千克到500千克不等,满足不同物品的运输需求。顶升行程可达50毫米,方便进行举升操作,使其更加适用于不同高度的货物搬运。
为了保证在黑暗环境下的正常运行,潜伏举升AGV配备了自主开启补光灯的功能,确保良好的视觉效果。同时,它还具备爬坡不大于8°和越障不大于20毫米的能力,能够轻松应对不平地形和障碍物。
潜伏举升AGV的导航精度达到±10毫米,保证了准确的定位和导航。充电方式灵活,可手动充电或自动充电,方便日常使用。安全防护方面,它配备了障碍物传感器、激光雷达超声波和急停按钮,确保运行过程中的安全性。
此外,潜伏举升AGV还具备人机交互功能,可以通过上位机系统调度,实现更加智能化的操作。语音功能的加入,可以进行语音播放和语音指令识别,提升了操作的便利性和效率。
潜伏举升AGV的应用广泛,适用于仓储物流、生产线搬运、医疗设备搬运等多个领域。它能够提高工作效率,减少人力投入,降低运营成本。无论您是需要进行物品搬运、货物分拣还是生产线运输,潜伏举升AGV都能够为您提供高效、可靠的解决方案。
购买我们的潜伏举升AGV,您将拥有一款先进的自动导航运输车,为您的工作和生产带来便利和效益。不论是提升生产力,还是改善物流运输,它都是您的理想选择。现在就联系我们,让我们为您提供更多详细信息和专业的解决方案!
性能参数 说明 产品型号 CT-JS-003-500 外形尺寸 L1050*W650*H280 导航类型 视觉+雷达混合导航 驱动形式 二轮差速驱动 行走方式 前进、后退、旋转、分岔转弯、等多功能行驶 行走速度 0-1.5M/S 额定负载 100KG-500KG 顶升行程 0-50mm 黑暗环境 自主开启补光灯 爬坡越障 爬坡不大于8°越障不大于20MM 转弯半径 原地90°/180°/360°旋转 导航精度 ±10mm 充电方式 手动充电/自动充电 安全防护 障碍物传感器+激光雷达超声波+急停按钮 续航时间 4-8H 人机交互 上位机系统调度 自重 230KG 语音功能 语音播放,语音指令识别
蓝鲸机器人案例商店包含了试用于各种场景的机器人。比如工业AGV,送餐机器人,巡检机器人等等。您可以在此页面中找到感兴趣的机器人咨询我们。
了解更多