
小强 XQ-mini通用ROS开发平台
J2900
8G内存
64G 固态硬盘}
激光雷达
深度摄像头
摄像头
应用视频
-
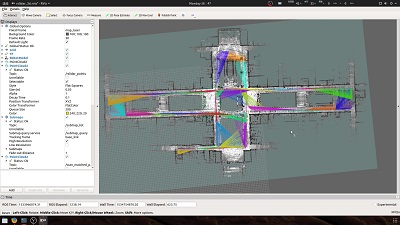
激光雷达实时创建地图和定位
小强搭载上激光雷达后,可以方便快捷的进行环境地图的建立和机器人导航。在激光雷达的实际使用中 需要机器人提供较为精确的里程计信息。小强的里程计通过陀螺仪和编码器融合得到,准确度高。从此 视频中可以看出在大范围(200Mx400M)情况下小强所建立的地图仍然十分精准。
-
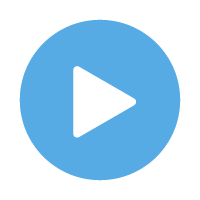
摄像头导航
小强使用摄像头采集周围环境图像,运用其强大的计算能力,识别出环境的三维结构。 视频中的红色和绿色点即为其识别出的环境特征点。视频中左下角地图为其识别出的环境地图。 可以看出小强可以流畅的运行视觉SLAM程序,并提供较为精准的定位信息。
-
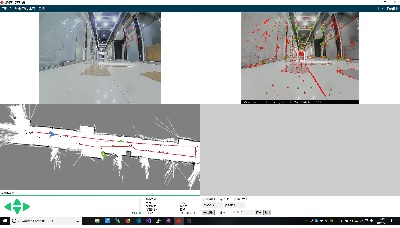
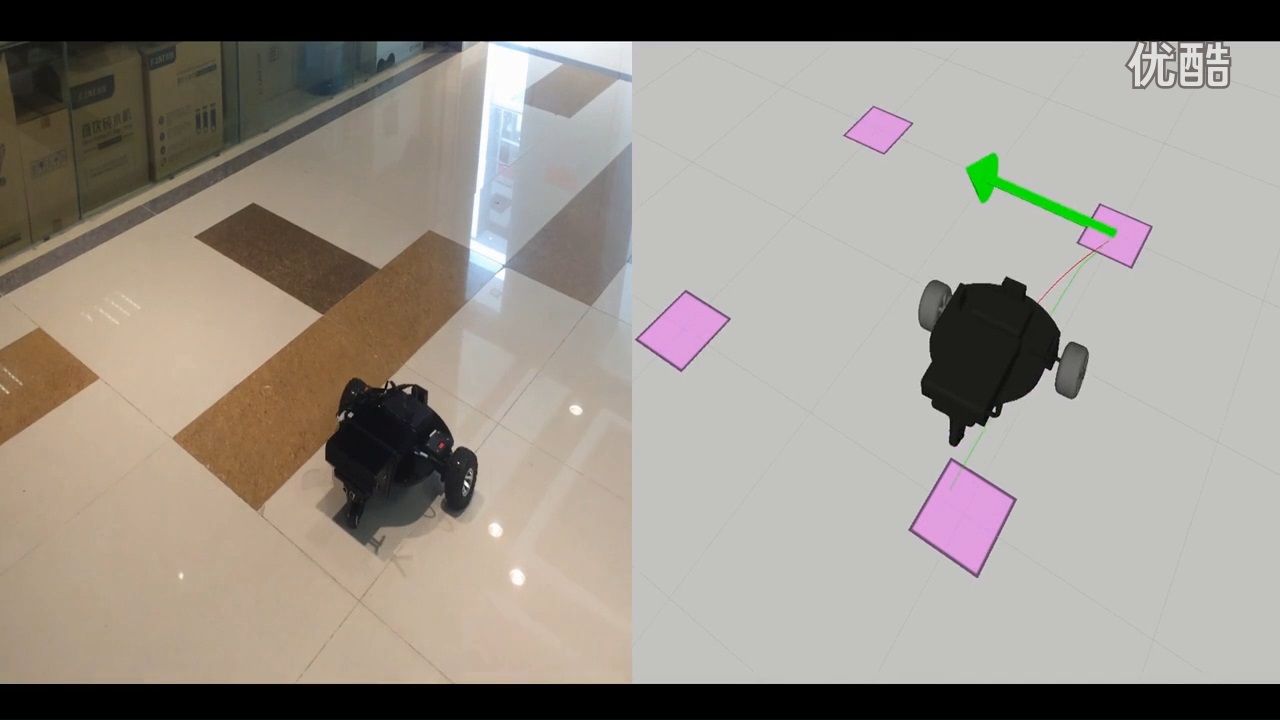
深度摄像头避障
在地面上随机的摆放着障碍物。小强通过深度摄像头的获取到障碍物的信息。视频中的绿色曲线就是小强的目标线路和位置。小强根据障碍物的情况,实时的规划路径。即视频中的蓝色曲线。可以看出即使是在比较复杂的障碍物环境中,小强也可以流畅的运动到目标的位置。
-
机械臂实例
小强具有丰富的扩展性,可以搭载机械臂。通过小强程序控制机械臂移动抓取位于小强前面的杯子
-
惯性导航
惯性导航即是仅利用小车自身的陀螺仪和编码器提供的信息进行导航。视频中的小车在惯性导航程序的控制下走了一个1M x 1M的正方形。左侧的图像是小车的实际运动情况,右侧则是小车在电脑界面中的实时的位置显示。
-
语音识别和跟随
小强识别对象的语音指令,随后启动跟随程序。跟随对象移动。


小强是一款专门用于ROS和SLAM技术开发的机器人平台。它具有强大的运算能力,持久的电池续航能力和灵活的运动能力,非常适合用来开发基于ROS的导航和机器视觉算法。 小强整体为三轮式结构,前面两个主动轮,最后一个万向轮作为从动轮。这样的结构能够保证其转弯角度的准确性。同时轮子采用不易打滑的橡胶材质再次保证了运动的精确性和稳定性。电机采用德国进口电机,单独控制器进行控制。小强的主控制器为一台J2900处理器的mini电脑,包含4G内存和64G固态硬盘。这样的硬件配置保证了小强强大的运算能力。电池为12V
10AH锂聚合物电池,经过测试可以保证连续使用四个小时。
小强XQ-mini 具有更小的尺寸,更灵活的运动和更便宜的价格。作为轻量级的ROS开发平台是不二之选。
硬件配置
-
J2900 酷睿双核处理器 2.6GHz CPU
4G 内存
64G 固态硬盘
-
供电电池为12V 10AH聚合物锂电池。输出12V稳定电压。
额定输出电流为5A,输出功率60W。 在较高的使用功率下测试能够使用4个小时。 -
最大速度: 0.8m/s
最大加速度: 1.5m/s^2
最大角速度: 230 deg/s
最大角加速度: 660 deg/s^2
-
5个USB接口,其中1个USB3.0接口,4个USB2.0接口
60fps 178度广角摄像头
MPU9250 9轴高精度陀螺仪
最大载重:5kg








